GSoC 2022: CAN Framework and Peripheral Support Final Report
CAN Framework and DCAN peripheral support
This report summarizes the project that I have worked on RTEMS CAN Framework and DCAN peripheral support throughout the Google Summer of Code 2022.
Final commits
All the feature-specific commits are squashed into two commits (CAN framework and DCAN support).
Project Overview
The objective of this project is to add CAN Framework and DCAN peripheral support for BeagleBone Black System on Chip in RTEMS. CAN protocol is a robust, reliable and multi-master serial communication protocol used to achieve real time message transfer between devices within CAN network. RTEMS being a real time operating system, CAN peripheral support would increase the potential to meet real time demands.
Project Objectives
- Add CAN Framework.
- Add DCAN peripheral support.
Mentors
- Christian Mauderer
- Pavel Pisa
- Gedare Bloom
Summary
In this project, we have implemented CAN Framework with Tx, minimal Rx support and DCAN peripheral support for BeagleBone Black in RTEMS. I have summarized the work that I have done in each phase.
Project Proposal: Google Doc
RTEMS Wiki: RTEMS Wiki
Project Blogs: Blogs
Gitlab Repo: Gitlab Repo
Phase 1
In the first phase,
- Design CAN Framework.
- CAN Hardware test setup (Communication between two BeagleBone Black through CAN bus).
- Adding DCAN driver to RTEMS in loopback mode.
Phase 2
In the second phase,
- Implementing CAN framework.
- Adding test applications.
- Adding Tx and Rx FIFO in CAN framework.
- Adding Concurrency handling mechanisms.
- Adding DCAN interrupt support.
Phase 3
In the third phase,
- Integrating DCAN and CAN framework.
- Adding CAN loopback driver.
- Testing CAN framework and DCAN driver.
- Adding documentation.
Output
CAN Loopback Test Application
CAN-Test-application is the test application which creates a CAN loopback interface and does Tx and Rx on the file.
Output on Beaglebone Black
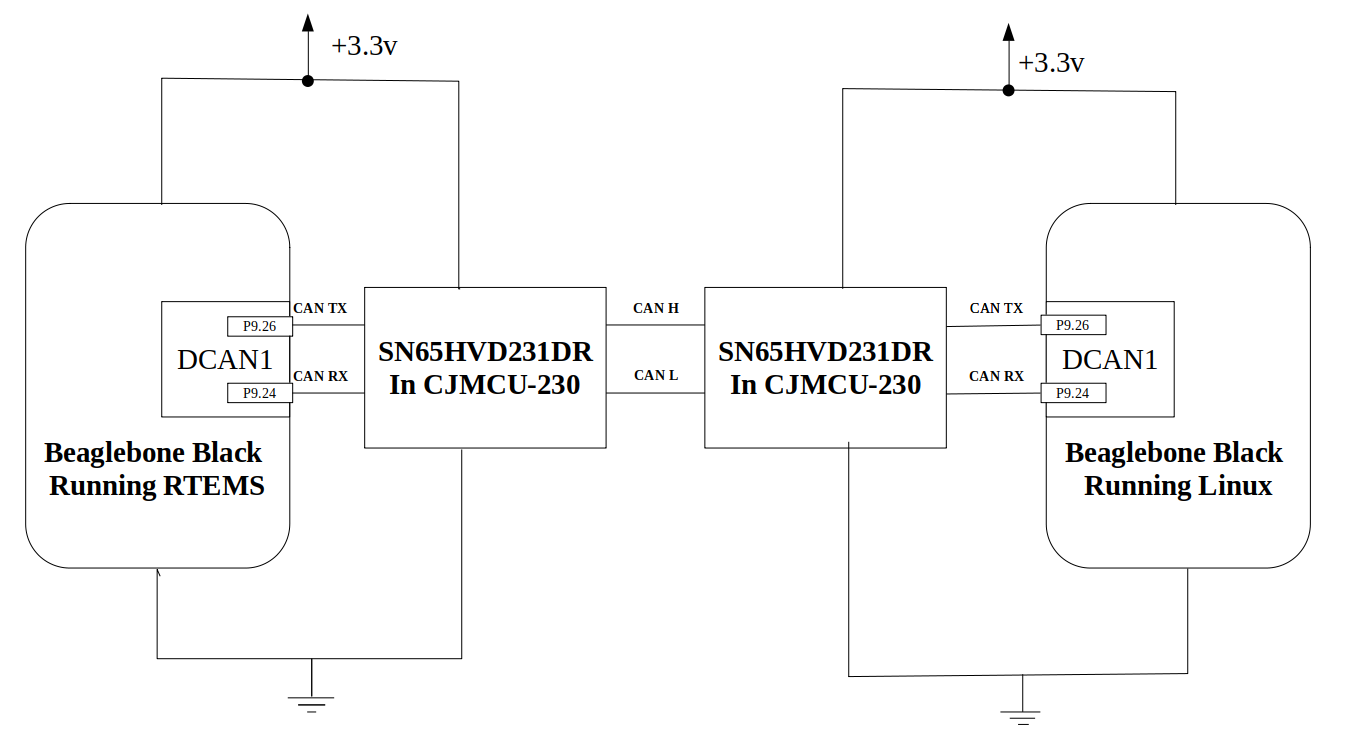 This figure shows the hardware setup used for testing CAN between two BeagleBone Blacks.
This figure shows the hardware setup used for testing CAN between two BeagleBone Blacks.
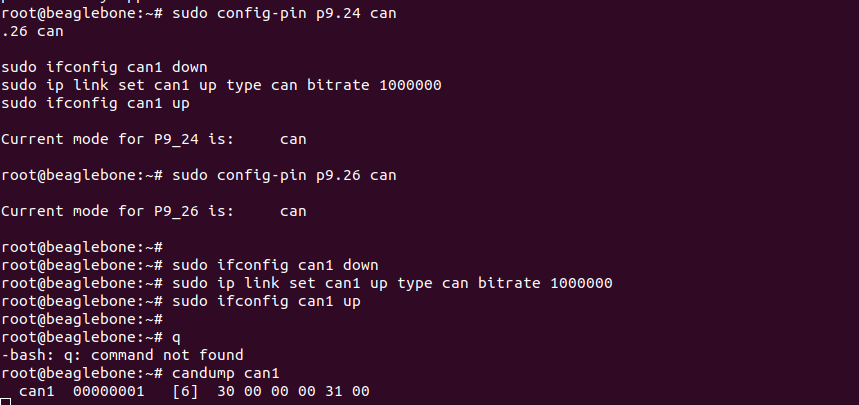
This image shows a CAN message sent from the BeagleBone Black application running on RTEMS with the CAN framework, which is received by another Beaglebone Black running Linux.
Acknowledgement
I like to thank my mentors Christian Mauderer, Gedare Bloom and Pavel Pisa for their guidance and support throughout my project. Especially Christian Mauderer for support and guidance without that I would have not done this project. I like to thank Oliver Hartkopp for the initial guidance for designing CAN Framework.
I also like to thank the RTEMS community (Joel Sherrill, Karel Gardas and many more) for the opportunity and support throughout the project.
What's Next?
I like contributing to the RTEMS community and like to continue to add other CAN features to the CAN framework